أسرار الأعماق: كيف تعمل الطائرات المسيرة تحت الماء وتستكشف المحيطات؟
في أعماق المحيط الهادئ، على بُعد أكثر من أربعة آلاف متر تحت السطح، تتحرك آلة بحجم سيارة صغيرة بصمت تام — لا حبال تربطها بالسطح، ولا إنسان يقودها مباشرة. هذه هي الطائرات المسيّرة تحت الماء، أو ما يُعرف اختصاراً بـ AUV (Autonomous Underwater Vehicle)، وهي تُعيد رسم خريطة فهمنا للمحيطات بطريقة لم تكن ممكنة قبل عقدين من الزمن.

ما هي الطائرات المسيّرة تحت الماء بالضبط؟
تعريف يتجاوز الاسم المُضلل
الاسم العربي 'طائرات مسيّرة تحت الماء' قد يُربك للوهلة الأولى — فهي لا تطير بالطبع. لكن المصطلح مستعار من عالم الطائرات بدون طيار (Drones)، ويشير إلى المبدأ الجوهري المشترك: مركبة تعمل باستقلالية دون تحكم بشري مباشر ولحظي. الفرق أن بيئة عملها هي الماء لا الهواء، وهذا يُغيّر كل شيء من حيث التصميم والتحديات.
تنقسم هذه المركبات إلى نوعين رئيسيين: مركبات تعمل بحبل توصيل (ROV — Remotely Operated Vehicle) ويتحكم فيها إنسان عن بُعد عبر كابل، ومركبات مستقلة تماماً (AUV) تُبرمج مسبقاً وتنفّذ مهمتها وحدها. هذا المقال يركّز على النوع الثاني، الأكثر إثارة والأصعب هندسياً.
لماذا ليست مجرد غوّاصات صغيرة؟
الغوّاصة التقليدية تحمل بشراً أو تحتاج إلى تحكم مستمر. المركبة المستقلة تحت الماء تُفكّر — بقدر ما يُمكن لآلة أن تفكّر. تُقرّر متى تتجنب عائقاً، وكيف تُعدّل مسارها عند تيار مائي مفاجئ، وأين تُركّز أجهزة الاستشعار. هذا المستوى من الاستقلالية هو ما يجعلها أداة علمية لا غنى عنها في استكشاف المناطق التي يصعب أو يستحيل على الإنسان الوصول إليها.
كيف تعمل هذه المركبات تقنياً؟ آليات الحركة والتوجيه
المشكلة الأولى: لا GPS تحت الماء
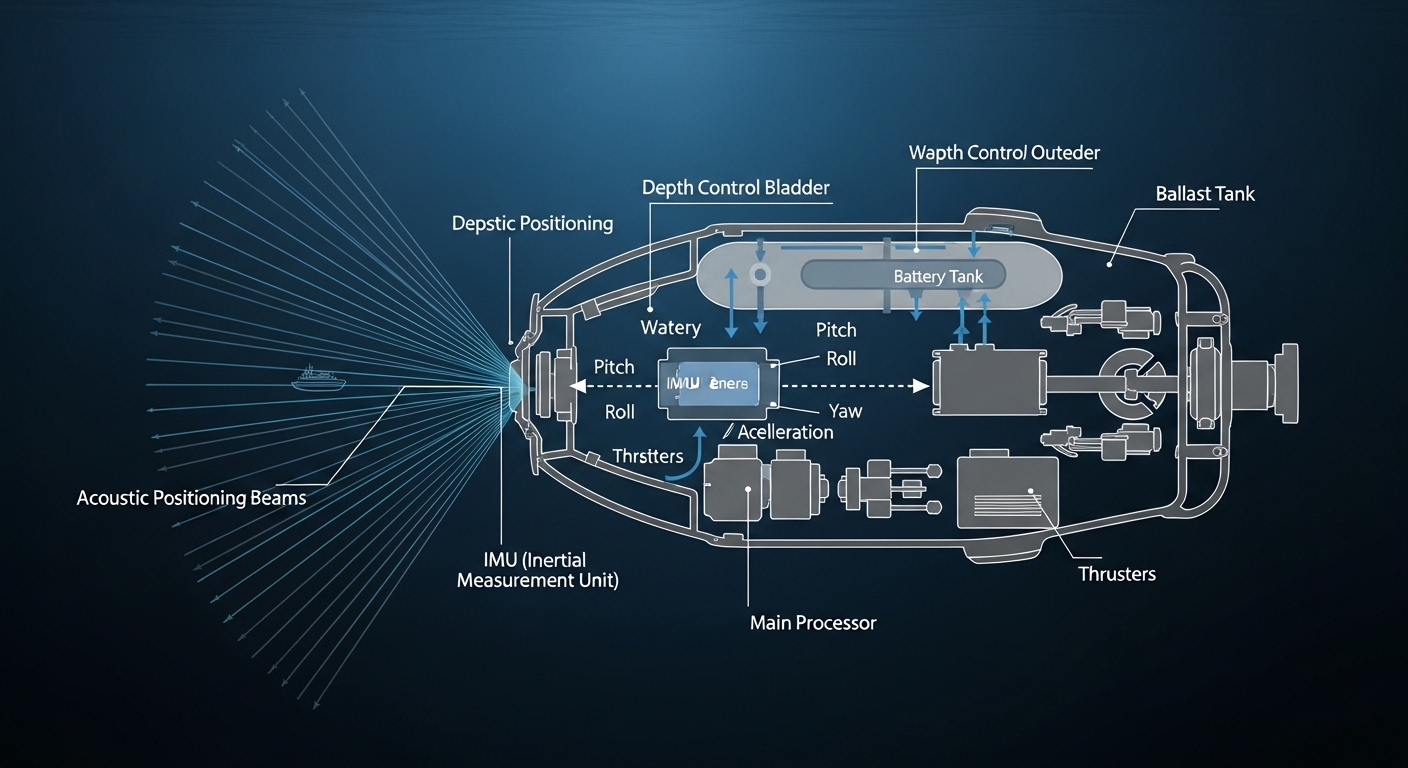
أي شخص استخدم خرائط الهاتف يعرف كم نعتمد على GPS. لكن الإشارات الراديوية لا تخترق الماء بشكل فعّال، وهذا يعني أن هذه المركبات تعمل في ظلام ملاحي تام. الحل؟ نظام يُسمى 'الملاحة بالقصور الذاتي' (Inertial Navigation System)، يحسب الموقع باستمرار بناءً على قياس التسارع والاتجاه منذ نقطة الانطلاق.
المشكلة أن هذا النظام يتراكم فيه خطأ صغير مع الوقت — مثل شخص يمشي بعيون مغمضة ويحسب خطواته. لذلك تُكمّله تقنية USBL (Ultra-Short Baseline Acoustic Positioning)، التي تستخدم موجات صوتية بين المركبة وسفينة الأم لتصحيح الموقع بشكل دوري. الصوت، لا الضوء ولا الراديو، هو لغة التواصل تحت الماء.
الدفع والتحكم في العمق
معظم المركبات المستقلة تستخدم مراوح كهربائية للدفع الأفقي، لكن التحكم في العمق الرأسي يعتمد أحياناً على آلية أذكى بكثير: تغيير الكثافة. بعض المركبات تضخ الزيت داخل أو خارج حويصلة مطاطية لتغيير حجمها الكلي دون تغيير كتلتها، مما يُغيّر كثافتها وبالتالي يجعلها تطفو أو تغوص. هذه التقنية تستهلك طاقة أقل بكثير من المراوح الرأسية، وهو أمر حيوي في رحلات تمتد لأيام.
الصوت هو الضوء تحت الماء — كل شيء من الملاحة إلى التواصل إلى رسم الخرائط يعتمد على الموجات الصوتية في الأعماق.
مصدر الطاقة: القيد الأكبر
البطاريات هي عنق الزجاجة الحقيقي. معظم المركبات تعمل بين 12 و72 ساعة قبل أن تحتاج إلى الشحن. مشروع 'Argo' العلمي يستخدم عوّامات مستقلة تعمل لأشهر، لكنها تتحرك ببطء شديد وتعتمد على تيارات المحيط. المركبات الأسرع تدفع ثمناً في العمر الزمني للمهمة. بعض التصاميم الحديثة تجرّب خلايا وقود تعمل بالهيدروجين لتمديد المدة، لكن هذه لا تزال في مرحلة التطوير.
ماذا تستطيع هذه المركبات أن تكتشف؟ التطبيقات الحقيقية
رسم خرائط قاع البحر
أقل من 25% من قاع المحيطات مُرسَم بدقة عالية — وهذا رقم مُحرج إذا علمنا أننا رسمنا خرائط لسطح المريخ بتفاصيل أدق. المركبات المستقلة تحمل أجهزة سونار متعددة الحزم (Multibeam Sonar) تمسح الأرضية بدقة تصل إلى أمتار قليلة، وتُنتج خرائط ثلاثية الأبعاد لتضاريس لم يرها إنسان من قبل.
في عام 2012، استخدم فريق من معهد وودز هول الأمريكي مركبات AUV لرسم خريطة تفصيلية لجزء من سلسلة جبال وسط المحيط الأطلسي، واكتشفوا فتحات حرارية مائية لم تكن معروفة. هذه الفتحات تحمل نُظُماً بيئية كاملة تعيش بدون ضوء الشمس — وهي من أكثر الأماكن إثارة للاهتمام في البحث عن الحياة خارج الأرض.
مراقبة المناخ وصحة المحيطات
المحيطات تمتص أكثر من 90% من الحرارة الزائدة الناتجة عن الاحترار العالمي. قياس هذا التوزيع الحراري بدقة يتطلب بيانات من آلاف النقاط في وقت واحد — مهمة مستحيلة للسفن التقليدية. أسطول 'Argo' العالمي يضم أكثر من ثلاثة آلاف عوّامة مستقلة تنتشر في كل محيطات العالم، تقيس درجة الحرارة والملوحة على أعماق مختلفة وترسل البيانات عبر الأقمار الصناعية عند صعودها للسطح.
التطبيقات الصناعية والأمنية
شركات النفط تستخدم هذه المركبات لفحص خطوط الأنابيب تحت الماء — مهمة كانت تتطلب غوّاصين بشريين في ظروف خطرة. البحريات العسكرية تستخدمها للكشف عن الألغام البحرية. وبعد كارثة انهيار جسر فرانسيس سكوت كي في بالتيمور عام 2024، استُخدمت مركبات مستقلة لمسح قاع النهر وتحديد مواقع الحطام بدقة قبل عمليات الإزالة.
أقل من ربع قاع المحيطات مُرسَم بدقة — بينما نملك خرائط أكثر تفصيلاً لسطح المريخ والقمر.

التحديات التقنية التي لا تزال تُعيق التطور
الضغط: العدو الصامت
كل عشرة أمتار من العمق تُضيف ضغطاً يعادل ضغطاً جوياً كاملاً. على عمق أربعة آلاف متر، يبلغ الضغط 400 ضعف ضغط الهواء على السطح. هذا يعني أن كل مكوّن إلكتروني يجب أن يكون محاطاً بهياكل تيتانيوم أو سيراميك مُصمَّمة بدقة متناهية. ثغرة بحجم دبوس في الإحكام تعني خسارة المركبة بالكامل.
الأمر الأكثر إثارة للاهتمام هو أن بعض المصمّمين يتخلّون عن فكرة المقاومة ويتبنّون عكسها: يملؤون الإلكترونيات بزيت معزول يتوازن مع ضغط الماء الخارجي، فلا يكون هناك فرق في الضغط يُسبّب تلفاً. هذا النهج يُسمى 'pressure-tolerant electronics' وهو يُبسّط التصميم بشكل كبير.
التواصل في الوقت الفعلي
إرسال فيديو عالي الدقة من عمق ثلاثة آلاف متر في الوقت الفعلي لا يزال تحدياً حقيقياً. الموجات الصوتية تنقل البيانات ببطء شديد مقارنة بالإشارات الراديوية — عادةً بضعة كيلوبايت في الثانية فقط. هذا يعني أن المركبة تعمل في معظم الوقت بشكل مستقل تماماً، وتُرسل ملخصات بيانات مضغوطة بدلاً من بث مستمر. الذكاء الاصطناعي المدمج يُصبح ضرورة لا رفاهية.
(Opinion: الحد الحقيقي لهذه التقنية ليس الضغط ولا الطاقة — بل هو قدرة الذكاء الاصطناعي على اتخاذ قرارات علمية جيدة في الميدان. المركبة التي تستطيع أن تُقرّر بنفسها 'هذا الشيء يستحق فحصاً أعمق' ستُغيّر الاستكشاف البحري تغييراً جذرياً.)
أسئلة شائعة
ما الفرق بين AUV وROV؟
المركبة المستقلة (AUV) تعمل بدون حبل توصيل وتُنفّذ مهامها باستقلالية تامة بعد البرمجة المسبقة. المركبة التي يتحكم فيها الإنسان عن بُعد (ROV) مرتبطة بسفينة الأم عبر كابل يُوفّر الطاقة والتواصل الفوري، مما يسمح بتدخل بشري لحظي لكنه يُقيّد النطاق الجغرافي للمهمة.
هل يمكن لهذه المركبات العمل في أعمق نقطة في المحيطات؟
أعمق نقطة معروفة هي 'تشالنجر ديب' في خندق ماريانا بعمق يتجاوز 10,900 متر. وصول المركبات إلى هذا العمق يتطلب هياكل استثنائية تتحمل ضغطاً يفوق ألف ضعف ضغط الجو. عدد محدود من المركبات المتخصصة وصل إلى هذه الأعماق، وتكلفتها تفوق بكثير المركبات القياسية المستخدمة في الأبحاث العادية.
هل تستطيع هذه المركبات تجنّب الاصطدام بالحياة البحرية تلقائياً؟
معظم المركبات الحديثة مزوّدة بأجهزة سونار للكشف عن العوائق وتتجنّب الاصطدام بالصخور والهياكل الثابتة. لكن تجنّب الكائنات المتحركة كالحيتان والأسماك الكبيرة لا يزال تحدياً، وتعتمد معظم البروتوكولات على تصميم المسارات بعيداً عن المناطق الحيوانية الحساسة بدلاً من الاعتماد على ردود الفعل الآنية.
ما يجعل هذه التقنية مثيرة حقاً ليس ما تفعله اليوم، بل ما تُلمّح إليه: محيطات مُراقَبة باستمرار، بيانات مناخية حقيقية من كل نقطة في العالم، وربما اكتشاف أشكال حياة في الأعماق تُعيد صياغة فهمنا لما يعنيه أن يكون شيء ما حياً. الغريب أننا نعرف أكثر عن سطح كواكب بعيدة مما نعرفه عن الأرض التي نقف عليها — أو بالأحرى، عن الأرض التي تغطيها المياه.




تعليقات
إرسال تعليق